隨著先進封裝(Advanced Packaging)、功率元件與新世代半導體技術快速發展,產業正逐步由、Dynamic Alignment 即時修正誤差、EFEM 模組化架構支撐多尺寸演進,協助客戶在 PLP 技術尚未完全標準化的市場環境下,仍能快速導入、自信擴展,並穩健因應未來更大尺寸與更高精度的製程挑戰。

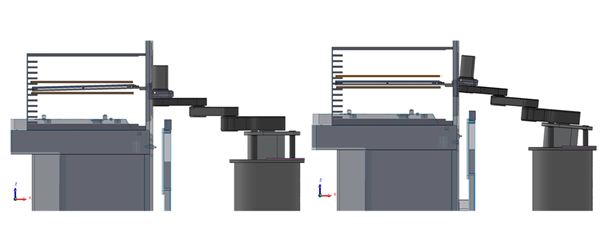
具備 Tilt 功能的機器人手臂設計概念(GPR Function)
針對 PLP 與玻璃基板在大尺寸、高重量、易翹曲的搬運特性,本自動化解決方案於機器人設計中特別導入 Tilt 傾斜功能(GPR Function),以提升面板取放過程的穩定性與對位容忍度。
此類 GPR 機器人採用 三組獨立的 Z 軸(Z1、Z2、Z3) 所構成的可傾斜平台設計,可在進行垂直升降的同時,實現面板姿態的精細調整。系統可支援約 ±2° 的傾斜角度範圍,足以補償因以下因素所造成的姿態誤差:
• 機器人手臂與末端治具在承載重型或大尺寸面板時產生的自然撓曲
• 面板翹曲(warpage)導致的非水平放置狀態
• 製程模組或對接設備本身的微小安裝誤差
• FOUP 或載具造成的面板姿態偏移
在控制邏輯上,Tilt 動作可分為三種基本運動模式:
• Pitch(沿 X 軸傾斜):透過 Z1 與 Z2 軸差動控制實現
• Roll(沿 Y 軸傾斜):透過 Z1 與 Z3 軸差動控制實現
• 純 Z 軸升降:Z1、Z2、Z3 軸同步運動,維持面板姿態不變
透過這樣的設計,機器人可在貼近製程模組或載具表面時,以「姿態先對齊,再進行接觸或放置」的方式運作,大幅降低因角度不匹配所導致的邊緣干涉、局部受力或玻璃破損風險。
整體而言,Tilt 功能讓機器人不再只是平移與旋轉的搬運工具,而是成為一個能主動適應實際製程環境與面板狀態的精密操作平台。此設計特別適合應用於 PLP、玻璃基板與高翹曲敏感製程,有效提升系統良率、設備容忍度與長期運轉穩定性。
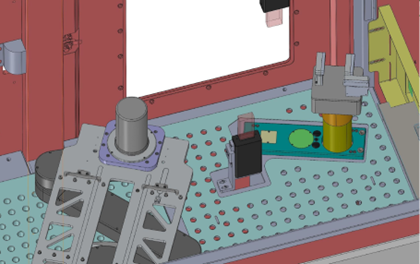
Flat Panel Pre Aligner(平板預對位模組)簡介
一、功能定位(What is a Flat Panel Pre Aligner)
1. Flat Panel Pre Aligner(FPA)光學式是一個安裝於 PLP EFEM 系統內的關鍵模組,其主要功能是在機器人搬運或取放平板之前,先行完成 面板的初步位置與角度校正(Pre Alignment)。
2. 它屬於 「靜態、基準式對位」設備,與 Dynamic Alignment(動態對位)形成互補關係。
________________________________________
二、設計目的(Purpose)
3. FPA 的主要目的是:
• 修正面板在 FOUP / Load Port 中的 初始擺放誤差
• 提供機器人一個 已知、穩定、可重複的對位基準
• 降低後續取放或製程模組對位的風險
• 提升整體系統穩定度與良率
________________________________________
三、主要功能項目
1. 面板角度校正(Angular Alignment)
• 偵測面板相對於系統基準的旋轉角度偏差
• 透過旋轉機構將面板調整至標準角度(通常為 0°)
2. X / Y 平面中心校正(Planar Centering)
• 將面板調整至既定的中心參考位置
• 確保面板相對於機器人、製程模組的位置一致
3. 建立穩定取放基準
• 提供「對齊完成後的位置與姿態」
• 供機器人後續 Pick / Place 或 Dynamic Alignment 使用
Dynamic Alignment(動態對位)功能簡介
一、功能目的(Purpose)
Dynamic Alignment 的主要目的,是在 平板(Glass / PLP Panel)被機器手臂取放之前,即時偵測其:
• 角度偏差(Angular Offset / α)
• 橫向或縱向位置偏移(Lateral / Longitudinal Offset)
並由機器手臂在移動過程中即時補償,確保面板能 準確、平順地被取放,避免因 FOUP、公差或擺放誤差造成的對位問題。